[공학저널 전찬민 기자] 현재 자율주행은 레벨4 개념에서 융합형 자율주행 기술의 레벨4+로 확장되고 있으며, 이는 차량 단독으로는 완전 자율주행에 한계가 있기 때문에 차량중심의 기술방식의 레벨 4에서 차량-인프라 융합 방식의 레벨4+로 자율주행 기술을 고도화하는 것이다.
융합형 레벨4+ 자율주행차는 도심로, 전용도로, 특정노선 등에서 정형과 비정형물체에 대응해 주행할 수 있는 자율주행차로, 차량-클라우드-도로교통의 인프라 융합과 사회적 현안 해결형 서비스에 해당하는 사회융합 기술을 포함하는 넓은 범위에서의 자율주행차를 의미한다.
기존에는 차량 센서 중심의 자율주행차와 클라우드, 도로교통인프라와 연계된 커넥티드카로 구분됐지만 2027년 융합형 레벨4+ 자율주행차 상용화 기반을 마련하고자 착수된 자율주행기술개발혁신사업을 통해 커넥티드 자율주행차를 목표로 기술 개발이 추진되고 있다. 이에 따라 자동차 단독형 지능에서 협조형 지능으로 발전하면서 기존의 기술과 다른 융합형 기술 개발이 필요한 상황이다.
현재 자율주행 기술 수준을 살펴보면, 기존의 자율주행 레벨3 구현을 위한 기술은 꾸준히 개발돼 양산 단계까지 도달했다. 차량 제조사에서 자율주행 기술을 적극 홍보하고 레벨3 차량의 양산 소식이 전해지면서 완전 자율주행 단계인 레벨4도 금방 상용화가 될 것이라는 기대감이 상승하고 있다.
하지만 운전자 제어권 전황이 없이 제한된 영역(ODD)에서 완전 자율 주행을 하는 레벨4와 비상 상황 시 운전자가 의무적으로 차량을 제어해야 하는 레벨3는 현격한 차이가 나타나고 있다. 레벨4부터는 완전 자율주행으로서 제어권 전환이 없기 때문에 자율주행시스템이 비상 상황을 포함한 모든 주행 상황을 통제해야 된다.
이로 인해 무엇보다도 자율주행 시스템의 이중화(redundancy)가 필수적이며, 주행 중 위험 상황이나 비정상 상황에 대응하기 위한 안전설계기술이 필수적으로 개발돼야 할 필요성이 강조되고 있다. 또한, 자율주행시스템의 해킹과 같은 외부 공격으로부터 보호하기 위한 보안 기술 개발도 함께 필요다.
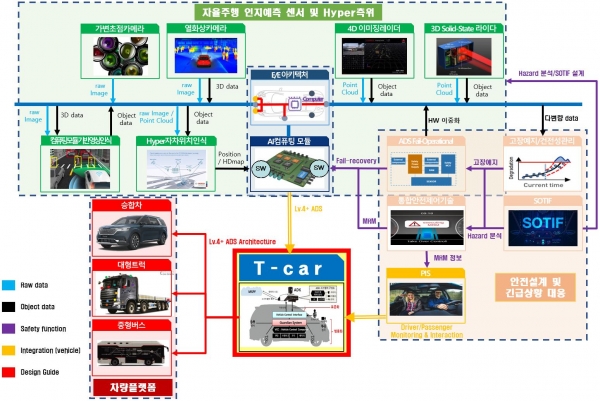
이처럼 레벨4를 달성하기 위해서는 레벨3 기술의 연장선이 아닌 새로운 기술을 개발이 필요하다. 이를 위해 자율주행기술개발혁신사업에서 자율주행차량용 컴퓨팅 기술, 차량탑재형 인지예측센싱 기술, 차량탑재형 자율주행 측위 기술, N2N 협력형 제어기술, 자율주행-탑승자 상호작용 기술, 자율주행시스템 안전설계 기술, 산업표준 자율주행 차량플랫폼 기술, 차량탑재형 부품과 시스템 평가 기술 등 차량융합신기술의 8개 중점 기술분야에 대한 개발이 진행되고 있다.

자율주행기술개발혁신사업단 차량융합팀 진종철 팀장(사진)은 “차량-클라우드-도로교통인프라간 연계를 통해서 자율주행 시스템 동작가능영역에서 사고발생 0%(1000만 Km 당 3.5회, 제어권 전환 1000만 Km 당 0.05회 이하) 수준 레벨4 자율주행 시스템 개발을 목표로 하고 있다”며 “커넥티드 자율주행차를 개발함으로서 국가 주력산업인 자동차 기술을 커넥티드 기술로 고도화하고 자동차 부품 기업의 업종 전화을 지원, 완전 자율주행 기술의 상용화를 앞당기고 글로벌 자율주행 서비스 시장을 선점할 수 있도록 사업단이 적극 지원하고 있다”고 말했다.
현재 개발 중 차량융합 기술 외에도 올해 4개의 신규과제가 추가로 착수될 예정이며, 중점분야 기준으로는 인지예측센싱, 협력형 제어기술, 부품과 시스템 평가 기술 3개의 분야에 대해 4개의 신규과제가 신규로 공고될 예정이다.
인지예측센싱 분야에는 ‘Lv.4 자율주행차량 전방위 멀티카메라 기반 주변상황인지예측 기술개발’ 과제이며, N2N 협력형 제어기술 분야에는 ‘주변환경 정보 융합 기반 헙력형 차량제어 기술개발’과 ‘허브 연계형 Lv.4 상용차 자율주행 예측구동제어 및 최적운행 기술 개발’ 과제가 공고된다. 또한, 차량탑재형 부품과 시스템 평가 기술 분야로는 ‘Lv.4 자율주행시스템 고장재현 및 통합 안전검증 기술개발’ 과제가 신규 공고된다.
한편, 자율주행기술개발혁신사업단은 지난 2022년 9월에 차량융합신기술의 통합과 연계를 위한 기술 세미나를 개최했다. 해당 세미나에서 차량융합신기술 기술협의체 활동 내역과 주요 성과를 발표했다.
또한, 차량융합신기술 분야의 과제와 기술에 대한 통합·연계 방안(T-car 기반 차량융합신기술 통합·연계도)을 발표했다. 이를 바탕으로 앞으로 레벨4 상용화 기술을 확보하기 위한 연구개발을 지속적으로 추진할 예정이다.
올해에는 차량융합신기술 이외에 ICT융합신기술, 도로교통융합신기술, 자율주행서비스 등 본 사업의 다양한 분야와 연계·협력할 수 있도록 업무를 추진할 예정이며, 이를 통해 2027년 레벨4+ 상용화 기반을 마련할 수 있도록 준비해나갈 예정이다.
